
暗く狭い洞窟の中でも空間を把握して飛び交い、そして正確にエサを捕獲することができるコウモリ。その秘密は独自「超音波ソナー」の能力にあります。しかし彼らは、どうやって自分が発した超音波を仲間のものと区別しているのでしょうか。
「ソナー」とは、音によって物体を探知したり距離を測る技術のことを言います。コウモリは超音波の音声を発して、それが物体に反射してきた反響音を聴取して分析することで、周囲の環境をリアルタイムに把握して飛行しています。
しかし、コウモリが狭い洞窟内などで群れとなって飛行する際には、ほかの個体が発した超音波音声もまた複雑に混在することになります。類似するほかの個体の音声が混在している中で、いったいどのようにして自分の微弱なエコーを選択的に聴いているのでしょうか。
この問題を調べるために、同志社大の研究グループはコウモリに「テレメトリマイクロホン」を搭載して、飛び交うそれぞれのコウモリが発する超音波を分離して計測するシステムを開発しました。
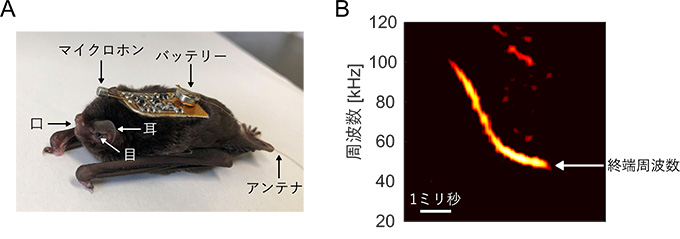
テレメトリマイクロホンを登載したユビナガコウモリ(同志社大学)
テレメトリマイクロホンとは、マイクロホンで受信した音声を無線を使って遠く離れた装置で受信して記録するシステムのことです。実験では、4個体のユビナガコウモリにテレメトリマイクロホンを搭載して音声を分析しました。
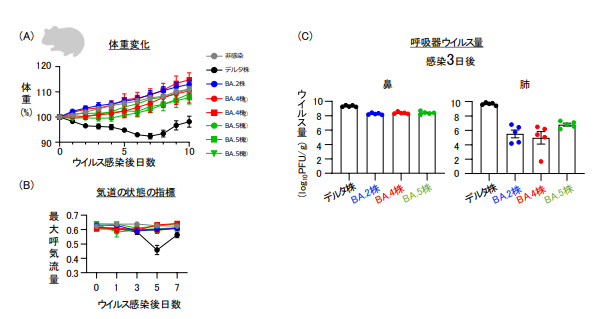
録音された超音波を分析したところ、基本周波数がおよそ100kHzから45kHzまで降下するような、「変調型」の超音波を放射していることがわかりました。この最も低下したときに周波数を終端周波数と呼びます。
集団飛行中のコウモリの飛行軌跡(上図)と放射した超音波の終端周波数の時間変化(下図)(同志社大学)
単独飛行したときと集団飛行したときの超音波を計測して比較したところ、コウモリは1個体で飛行するときは各個体が似たような終端周波数を使っていたのに対して、4個体で飛行するときには終端周波数の差をわずかに広げる傾向がみられました。
つまり、コウモリたちは群れとなって飛行しているときに互いのセンシング信号が混信しないように、それぞれが発する超音波の周波数をうまく調節し合うことで、混信を回避していることが明らかになりました。
それも、音声の類似度を効率的に低下することができる「終端周波数」を変化していることもわかりました。
コウモリが利用している混信に強い信号設計やシンプルな混信回避アルゴリズムは、たとえば多数の自律センシングロボットの群制御といった技術への応用につながることが期待されます。










































 速読力をアップする方法
速読力をアップする方法
 脳力をアップする方法
脳力をアップする方法
 英語力をアップする方法
英語力をアップする方法