脳波を計測してアンドロイドを操作するブレイン・マシン・インターフェースによって、「3本目の腕」を動かすことに成功しています。自分の腕を使いながら別の腕も使えることから、さまざまなマルチタスクを可能にする技術に発展しそうです。
「思うだけ」で機器を操作できるブレイン・マシン・インターフェース(BMI)の研究は、さまざまな用途が考えられるため期待されている分野のひとつです。
これまでの研究から、アンドロイドを操作する際にフィードバックの与え方を工夫して操作者の脳活動パターンを変化させることで、BMIの性能を引き上げることができることがわかっています。
また、通常のロボットよりも外観が人間に似ている「アンドロイド」の方が一体感が高まり、この効果が高いこともわかっています。
しかし現状では、使用者が自分の身体を静止した状態で強く集中する必要があるなど、その性能はまだまだ限定的です。これまでの技術では障がい者用の用途などに限られており、汎用化が課題となっています。
今回、国際電気通信基礎技術研究所の研究グループは自分の両腕も使いながらロボットアームを操作するBMIの手法を世界で初めて実現しました。

ロボットアーム(国際電気通信基礎技術研究所)
今回の実験で使用したロボットアームはアンドロイドの腕で、人間の腕に似た外観をしています。
このアームを実験参加者の左横に設置して「肩からもう1本の腕が出ている」ようにします。
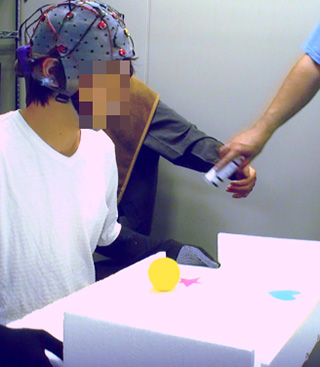
実験の様子(国際電気通信基礎技術研究所)
実験では、参加者は両腕で板をもって、その板の上に置かれたボールが「板に描かれた4つの図形」の上を順番に回るように板を動かし続けました。
そしてその間に、参加者に向けてペットボトルを差し出します。参加者は板を動かしながらロボットアームを動かしてペットボトルをつかみます。
ペットボトルを差し出されたらアームでボトルを握り、ペットボトルが引き戻されたらアームを下ろす操作をします。
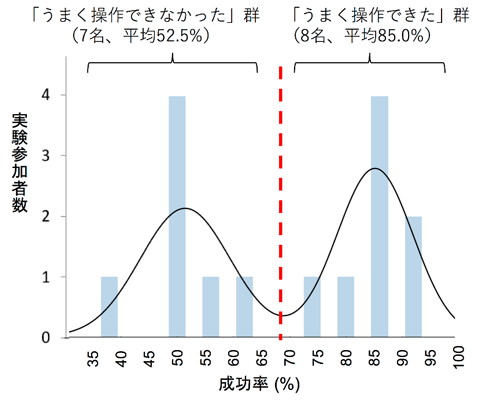
実験の結果(国際電気通信基礎技術研究所)
実験の結果、うまく操作できるグループ(8名)と操作できないグループ(7名)に分かれることがわかりました。操作できるグループでは平均で85%の成功率が得られています。
BMIでロボットを操作する場合、通常では「右手を動かす」または「左手を動かす」といった運動のイメージを想起して、その脳活動を計測してアームを操作します。
しかし、今回の実験のように本来はもっていない「3本目の腕」を動かす場合は動作のイメージを想起することは困難です。
また、本来の両腕を動かすことに伴う脳活動とロボットを動かすための脳活動を区別することも容易ではありません。
そこで今回の実験では、「差し出されたペットボトルをつかむ」という意図をもってもらい、このイメージを検出するBMI手法を開発しました。
また研究グループは、外観が人に類似したロボットアームを身体から出ているように設置したことも、今回の実験を成功させた要因として挙げています。
今回の実験では、うまく操作できる人とできない人が明確に別れることがわかりました。これはマルチタスク能力の優劣が関係していると考えられます。逆に言えば、アンドロイドの腕をBMIで動かす訓練をすることでマルチタスク能力を全般的に向上させることができるかも知れません。
また、今回は「ペットボトルをつかむ」という1種類の操作しか実施しませんでしたが、研究グループは今後、さまざまな意図を区別して制御できるようになる可能性があるとしています。










































 速読力をアップする方法
速読力をアップする方法
 脳力をアップする方法
脳力をアップする方法
 英語力をアップする方法
英語力をアップする方法